1.2. Strom und Spannung - fbi.h
Werbung

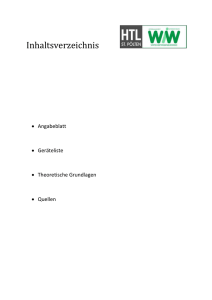
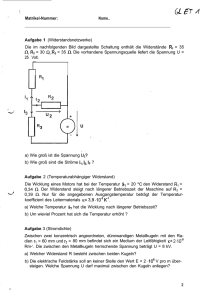
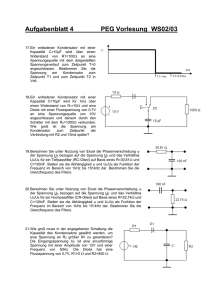
1.2. Strom und Spannung Aus dem Mooresche Gesetz ergeben sich bis heute die folgenden Konsequenzen1 : • Verdopplung der Schaltkreise pro Chip alle 18 Monate (1975 von Moore formuliert, ursprünglich sagte Moore 1965 die Verdopplung alle 12 Monate voraus). • Die Verarbeitungsleistung der Prozessoren verdoppelt sich alle 1,5 Jahre. • Vervierfachung der Speichergröße alle 3 Jahre. • Verdopplung der Speicherleistung alle 10 Jahre. • Doppelte Leistung zum gleichen Preis in weniger als zwei Jahren. Ein Gefühl für die unvorstellbare Menge an Schaltkreisen, welche in Schaltkreisen existieren, zeigt das nachfolgende Beispiel 2 : Beispiel 1.1. 42 Jahre nachdem Moore sein Exponentialgesetz der Mikroelektronik formuliert hat, ist die Summe aller in einem Jahr produzierten Transistoren auf mehr als eine Trillion (1018 ) Stück angewachsen. Dabei sind alle „verbauten“ bipolaren und unipolaren Transistoren gerechnet. Zum Vergleich: Wissenschaftler der Australian National University schätzen die Anzahl aller Sandkörner in den Wüsten und an den Stränden der Erde auf rund 70 Trillionen (70 · 1018 ) [cs07] 1.2. Strom und Spannung Dieses Kapitel führt kurz in die Elektrizitätslehre ein, bzw. wiederholt einige Ihnen bereits bekannte Begriffe und Zusammenhänge. Eine gute Übersicht bietet [KSW06]. Beginnen wir zuerst mit den Definitionen von Spannung und Strom: Die gerichtete Bewegung von elektrischen Ladungsträgern bezeichnet man als elektrischen Strom. Der elektrische Strom I ist die Ladungsmenge dQ, die in einem Zeitabschnitt dt den Leitungsquerschnitt durchfließt. I= dQ dt [A] (1.1) 1 Diese Angaben in dieser Auflistung sind an vielen Stellen zu finden, aktuelle Basisdaten beispielsweise unter [ITR] 2 Eine vergleichbare Entwicklung in der Luftfahrt würde folgendes bedeuten: 1978 hat ein Flug von New York nach Paris 900 $ gekostet und 7 Stunden gedauert. 2003 wäre man bei Kosten von nur 1 ¢ in nur einer 1/4 min in Paris gewesen [Int]. ver.2.05 pre 24. März 2009 (Kap.1-4, 8)) 3 B 1. Grundlagen der Elektronik Die Einheit des elektrischen Stroms I ist Ampère, Symbol A Die elektrische Spannung U ist die treibende Kraft, welche die Ladungsbewegung und damit den Strom I verursacht. B Die Einheit der elektrischen Spannung U ist Volt, Symbol V Einige Eigenschaften von Spannung U und Strom I werden wir im folgenden Absatz kennen lernen – sie werden auch als die Kirchhoffschen Sätze bezeichnet. 1.2.1. Das Kirchhoffsche Gesetz Bild 1.3.: Knotenregel Bild 1.4.: Maschenregel Betrachten wir in Abb. 1.3 die Summe aller Ströme, welche in den Knoten hinein- beziehungsweise hinausfließen, so erhalten wir den folgenden Satz: 1. Kirchhoffschen Satz: Die Summe aller in einem Knotenpunkt zusammenlaufenden Ströme ist Null n X Ii = 0 (1.2) i=1 Der 1. Kirchhoffschen Satz, den Gleichung 1.2 mathematisch beschreibt, kann auch wie folgt ausgedrückt werden: 4 Student’s Copy FbI SS09 1.2. Strom und Spannung Die Summe der zum Knoten hineinfließenden Ströme ist gleich der Summe der abfließenden Ströme. Abbildung 1.4 zeigt eine Masche, in der wir die Spannungen betrachten; für diese gilt Gleichung 1.3 mit dem folgenden Satz: 2. Kirchhoffschen Satz: Die Summe aller Spannungen in einer Masche ist Null n X Ui = 0 (1.3) i=1 Betrachten wir nun im Folgenden ein einfachen Netzwerk (Abb. 1.5 u. 1.6) und beschreiben mit Hilfe des Kirchhoffschen Gesetzes, d.h. der Knoten- und der Maschenregel, alle Ströme und Spannungen. Zusammen mit dem Ohmschen Gesetz, Kap.1.2.2 können wir dann sogar alle Ströme und Spannungen aus den Widerständen Ri und der angelegten Spannung U0 berechnen. Bild 1.5.: Netzwerk-Knoten Bild 1.6.: Netzwerk-Maschen Für Abb. 1.5, welche die Knoten unseres Netzwerkes betrachtet, lassen sich die Ströme In , und für Abb. 1.6, welche die Maschen unseres Netzwerkes betrachtet, lassen sich die Spannungen Un wie folgt berechnen: I0 = I1 + I3 −U0 + U1 + U2 = 0 I2 = I1 + I3 −U1 + U3 = 0 Daraus folgt, dass gilt: I2 = I0 , sowie U0 = U1 + U2 und U1 = U3 . 1.2.2. Widerstand und Ohmsches Gesetz Der Strom an einem Verbraucher ist abhängig von der Größe der treibenden Spannung. Sind die Eigenschaften des Verbrauchers unabhängig von dem durch ihn fließenden Strom, spricht man von einem ohmschen Widerstand und es gilt das ohmschen Gesetz: ver.2.05 pre 24. März 2009 (Kap.1-4, 8)) 5 1. Grundlagen der Elektronik Der Strom ändert sich proportional zur Spannung. Den Proportionalitätsfaktor R nennt man elektrischen Widerstand mit der Einheit Ohm und dem Formelzeichen Ω3 . [KSW06] Bei einer gegebenen Spannung U ist der Strom I durch den Widerstand R begrenzt. Man kann dies auch wie folgt ausdrücken: Bei einem gegebenen Strom I fällt am Widerstand R die Spannung U ab. U =R·I R= U I I= U R (1.4) Bild 1.7.: Widerstand Die Formel für den Widerstand und deren Umformung lässt sich gut mit einer Eselsbrücke merken, welche als Abbildung C.1 im Anhang auf Seite 245 zu finden ist. B Den Quotienten R aus Spannung und Strom nennt man den elektrischen Widerstand. Die Einheit des Widerstands R ist das Ohm, Symbol Ω Die SI-Einheit für das Ohm ist Ω = Volt/Ampere = V/A V U R= [Ω] = I A 1.2.3. Reihen- und Parallelschaltung Für die Betrachtung von Schaltkreisen sind die Parallelschaltung von Bauelementen und die Reihenschaltung von Bedeutung. B Reihenschaltung: In Reihe geschaltete Bauelemente sind vom selben Strom durchflossen . B Parallelschaltung: Parallel geschaltete Bauelemente liegen an derselben Spannung. 3 6 griech. Buchstabe Omega, gesprochen „Omega“ Student’s Copy FbI SS09 1.2. Strom und Spannung Bild 1.8.: Reihenschaltung von Widerständen Bild 1.9.: Parallelschaltung von Widerständen Betrachten wir zuerst die Reihenschaltung von Widerständen in Abbildung 1.8. Wir wollen den Gesamtwiderstand Rges der Anordnung berechnen. Aus dem ohmschen Gesetz (Gl. 1.4) wissen wir, dass bei gegebenem Strom I am Widerstand Ri die Spannung Ui abfällt, siehe Abb. 1.7. Die Maschenregel (Abb. 1.4, S. 4) besagt nun, dass die Summe der Spannungen in einer Masche gleich Null ist. Daher gilt: Rges · I = U n X = Ui i=1 n X =I Ri = R1 I + R2 I + · · · + Rn I = I · (R1 + R2 + · · · Rn ) i=1 Daraus folgt für den Gesamtwiderstand einer Serienschaltung von Widerständen: Rges = n X (1.5) Ri i=1 In einer Serienschaltung von Widerständen ist der Gesamtwiderstand gleich der Summe der Einzelwiderstände Nun betrachten wir die Parallelschaltung von Widerständen in Abbildung 1.9. Auch hier wollen wir wieder den Gesamtwiderstand Rges der Anordnung berechnen. Die Knotenregel (Abb. 1.3, S. 4) besagt nun, dass die Summe der Ströme an einem Knoten gleich Null ist. Daher gilt ver.2.05 pre 24. März 2009 (Kap.1-4, 8)) 7 1. Grundlagen der Elektronik nach dem ohmschen Gesetz (Gl. 1.4): U = Iges Rges n X = Ii = I1 + I2 + · · · + In i=1 =U n X 1 R i=1 i =U ·( 1 1 1 + + ··· + ) R1 R2 Rn Daraus folgt für den Gesamtwiderstand einer Parallelschaltung von Widerständen: n X 1 1 = Rges i=1 Ri (1.6) In einer Parallelschaltung von Widerständen ist der Kehrwert des Gesamtwiderstands gleich der Summe der Kehrwerte der Einzelwiderstände Den Kehrwert eines Widerstands nennt man auch dessen Leitwert Eine wichtige Anordnung aus zwei Widerständen ist der Spannungsteiler. Dabei sind zwei Widerstände in Serie an die Eingangsspannung geschaltet, die Ausgangsspannung wird in der Mitte zwischen beiden Widerständen abgegriffen, daher der Name. Der Strom durch die beiden Widerstände ist bestimmt durch I = URi = R1U+R2 . Die gesuchte Ausgangsspannung Ua ist gleich der Spannung, welche an R2 abfällt, also Ua = I · R2 . Damit ergibt sich die Gleichung für einen Spannungsteiler: Bild 1.10.: Spannungsteiler Ua = Ui R2 R1 + R2 (1.7) 1.2.4. Leistung und Energie Die Begriffe Leistung und Energie spielen in der Technik eine große Rolle. Einerseits in Bezug auf die Energieversorgung, andererseits auf die Leistung. Auch beispielsweise die, welche im Inneren von technischen Anwendungen ohne Nutzen verbraucht wird, nämlich die Verlustleistung. Dieses Kapitel stellt auch den Bezug zwischen Leistung und Energie her, und stellt als Exkurs auch einen Zusammenhang zu anderen Energieformen – als der elektrischen – her. 8 Student’s Copy FbI SS09 1.3. Aktive und passive Bauelemente 1.3.3. Kapazität Neben Widerständen sind Kondensatoren die wichtigsten passiven Bauelemente. Der Kondensator ist ein ladungsspeicherndes Element, bestehend aus zwei Elektroden, die durch ein nicht-leitendes Dielektrikum voneinander getrennt sind, siehe [Roh83]. Wir werden nur kurz auf einige wenige Aspekte eingehen, bei weiterem Interesse sei auf die Literatur verwiesen, siehe auch Anhang B ab Seite 241. Bild 1.15.: Symbol Kondensator Um erst einmal ein Gefühl dafür zu bekommen, was ein Kondensator eigentlich ist, betrachten wir das folgende Beispiel: Beispiel 1.7. Stellen wir uns einen Fahrradreifen vor, welchen wir mit einer Luftpumpe aufladen. Je mehr wir den Reifen mit Luft aufladen um so mehr steigt der Druck (Spannung) im Reifen. Wir könnten uns so etwas wie einen Quotienten aus Druck und Luftmenge ausdenken und diesen als Kapazität des Reifens definieren. Das scheint durchaus Sinn zu machen: Ein Autoreifen hätte demnach eine viel größere Kapazität als ein Fahrradreifen. Und um einen gleichen Druck zu erreichen, müssten wir viel öfter pumpen. Die Kapazität C eines Kondensators ist der Quotient aus Ladung Q und Spannung U, siehe Gl. 1.25. C= Q U (1.25) Die Einheit der Kapazität C ist das Farad, Symbol F Die SI-Einheit für das Farad ist F = Amperesekunde/Volt = As/V Weil der Strom die Änderung der Ladung mit der Zeit ist, also I(t) = gilt I(t) = dU(t) dQ =C dt dt dQ dt und wegen Q = C · U, (1.26) ver.2.05 pre 24. März 2009 (Kap.1-4, 8)) 17 B 1. Grundlagen der Elektronik 1.3.6. Auf- und Entladung von Kapazitäten In diesem Abschnitt7 wird die Auf- und Entladung von Kapazitäten an Gleichspannungsquellen diskutiert. Ausgangspunkt ist die Reihenschaltung eines OhmR schen Widerstandes mit einer Kapazität wie in Abbildung 1.20 gezeigt. Wir wollen nun den Prozess +5V der Aufladung des Kondensators C betrachten, wenn C zum Zeitpunkt t = t0 für die Spannung am Kondensator Uc gilt UC (t) = 0V. Die Versorgungsspannung sei U B = 5V. Nun soll untersucht werBild 1.20.: Reihenschaltung von Kondensa- den wie der zeitlich Verlauf der Spannung am Kontor und Ohmschen Widerstand densator UC ist, wenn die Versorgungsspannung an einer Gleichspannungsquelle zum Zeitpunkt t0 eingeschaltet wird. Für die zeitliche Entwicklung der Spannung am Kondensator gilt, wobei e die Eulersche Zahl8 ist. UC (t) = U B (1 − e−t/RC ) (1.30) Eine Analyse der Struktur des Ausdrucks zeigt, dass sich die Spannung am Kondensator im Zeitverlauf der Versorgungsspannung nähern wird. Es liegt ein Exponentialgesetz vor mit der sogenannten e-Funktion. Siehe hierzu Anhang A.1.1. Mit U B = 5V, R = 200kΩ und C = 100µF ergibt sich der in Abbildung 1.21 gezeigte Verlauf einer Aufladung. Eine erste qualitative UC [V ] 5 UC [V ] 5 4 4 3 3 2 2 1 1 0 0 20 40 60 80 100 120 t [s] Bild 1.21.: Aufladung eines Kondensators 0 0 20 40 60 80 100 120 t [s] Bild 1.22.: Aufladung eines Kondensators zum Zeitpunkt der Zeitkonstante Analyse der Abbildung zeigt, dass sich die Spannung am Kondensator tatsächlich im Zeitverlauf der Versorgungsspannung nähert. Für t = R·C ergibt sich der Exponent des zweiten Terms in der Klammer zu −1. Diese systemspezifische Zeit wird als Zeitkonstante τ der Schaltung bezeichnet. Für unsere oben spezifizierte Schaltung ist τ = 20s. Wir können wir für t = 20s die Spannung 7 8 20 Autor: Prof. Dr. Klaus Kasper, h_da, FbI e = 2.718281828. . . Student’s Copy FbI SS09 1.3. Aktive und passive Bauelemente am Kondensator zu UC (20s) = U B (1 − e−20s/100kΩ∗200µF ) = U B (1 − e−1 ) = U B (1 − 1/e) = U B − 1/e ∗ U B ' 3, 16V berechnen. Der Kondensator ist nach 20s auf ca 63,2% der Versorgungsspannung aufgeladen. In Abbildung 1.22 sind zur Veranschaulichung der Ausführungen τ und UC (τ) eingezeichnet. Bei der Zeitkonstanten τ handelt es sich offensichtlich um eine schaltungspezifische Konstante, die in einfacher Weise für eine reale Schaltung empirisch ermittelt werden kann. Aus der Kenntnis der Zeitkonstanten und der Größe eines Bauelements unserer Schaltung aus Abbildung 1.20 kann somit die Größe des zweiten Schaltungselements, sei es nun die Kapazität oder der Ohmsche Widerstand, in einfacher Weise ermittelt werden. Uns stellt sich nun die Frage nach welcher Zeit t wir davon ausgehen können, dass ein Kondensator vollständig geladen ist. Nach einer Zeitspanne t = 5 · τ beträgt die Spannung am Kondensator ca. 99,3% der Versorgungsspannung; dies bezeichnet man als vollständig aufgeladen. In realen Systemen gelingt es nicht die Flächen eines Kondesators vollständig elektrisch zu isolieren. Daher kommt es immer zu einer spontanen Entladung eines Kondensators. Dies ist auch die Ursache für die NotwenUC [V ] 5 digkeit von Refreshzyklen für Dynamische RAM4 Bausteine (DRAM), siehe Kapitel 5.3. Wird der Kondensator als Energiespeicher verwen3 det, so erfolgt die Entladung über einen elek2 trischen Verbraucher – beispielsweise eine LED1 Fahrradlampe im Standlichtbetrieb. Mit 0 0 20 40 60 80 100 120 t [s] UC (t) = U0 (e−t/RC ). (1.31) wird der zeitliche Verlauf der Spannung am Bild 1.23.: Entladung eines Kondensators Kondensator während der Entladung beschrieben. Wenn wir annehmen, dass unsere Schaltung aus Abbildung 1.20 kurzgeschlossen wird – die Spannungsquelle also aus der Schaltung entfernt wird und die beiden Anschlüsse direkt verbunden werden, ergibt sich die in Abbildung 1.23 gezeigte Entladekurve unserer Schaltung. Die Spannung am Kondensator zum Zeitpunkt t = 0 ist U0 . Die Entladung hat die selbe schaltungsspezifische Zeitkonstante τ wie die Aufladung. Ein Kondensator ist nach der Zeitkonstanten τ bis auf 1/e-tel der Ausgangsspannung entladen. In unserem Beispiel liegt am Kondensator nach der Zeitkonstanten τ noch eine Spannung von ca. 1,84 V an. Aus der Entladekurve kann daher in analoger Weise zur Auswertung der Aufladekurve die Größe eines unbekannten Schaltungselements bestimmt werden. Übung 1.1. Bitte zeigen Sie mit Hilfe des internationalen Einheitensystems (SI-Systems), dass die Einheit des Ausdrucks R · C eine Zeit, gemessen in Sekunden, ist. ver.2.05 pre 24. März 2009 (Kap.1-4, 8)) 21 1. Grundlagen der Elektronik Eine normale Dotierung beträgt bei n-leitend 1 Donator auf 107 Si-Atome p-leitend 1 Akzeptor auf 106 Si-Atome [Wika] Besonders interessant werden die dotierten Halbleiter, wenn man sie miteinander kombiniert. Dies werden wir im folgenden Abschnitt 1.3.11 und beim bipolaren Transistor in Kapitel 1.3.14 kennen lernen. 1.3.11. Halbleiter-Übergang Grenzen in einem Kristall eine n- und eine p-leitende Zone aneinander, so diffundieren freie Elektronen in Richtung ihres Konzentrationsgefälles aus dem n-leitenden teil in den p-leitenden Teil. Umgekehrt diffundieren Löcher aus der p- in die n-Zone [Roh83]. Der Übergang verarmt an Ladungsträgern und es entsteht ein elektrisches Feld bzw. eine Spannung, welche weitere Rekombination von Elektronen mit Löchern erschwert. Der n-p-Übergang verarmt an Ladungsträgern, siehe Abbildung 1.30. Bild 1.29.: Durchlass Übergang am p-n- Bild 1.30.: Sperr-Richtung am p-nÜbergang Dieser Effekt wird bei der Diode benutzt, welche wir im folgenden Abschnitt 1.3.12 kennen lernen. 1.3.12. Diode Bevor wir in die Details der Halbleiter-Diode gehen, verwenden wir zuerst ein mechanisches Modell für Spannung und Strom an Hand Elementen in einem (geschlossenen) Wasserkreislauf. Betrachten wir zuerst eine Wasserleitung. Dann können wir den Wasserdruck mit der elektrischen Spannung U und die Wassermenge, die durch einen bestimmten Querschnitt fließt, mit dem elektrischen Strom I in Verbindung bringen. Der einfachste Fall ist eine Verengung in der Wasserleitung, wie in Abbildung 1.31 zu sehen ist. Die Verengung stellt für den Druck einen Widerstand dar. Wie wir im Kapitel 1.3.2 über den ohmschen Widerstand bereits gesehen haben, besteht zwischen Strom und Spannung – im Modell Druck und Wassermenge – ein linearer Zusammenhang, der vom Widerstandswert – hier der Enge im Rohr – abhängt, siehe Abbildung 1.32. Man sieht auch, dass bei Umkehrung des 28 Student’s Copy FbI SS09 1.3. Aktive und passive Bauelemente Bild 1.31.: Widerstand in Rohrleitung Bild 1.32.: Druck-Fluß – SpannungStrom Drucks in der Wasserleitung auch der Fluss in die andere Richtung geht, was im Diagramm als ein negativer Druck dargestellt ist. Sehen wir uns jetzt ein anderes Element in einem hydraulischen System – unserer Wasserleitung – an, ein Ventil. Es besteht, wie in Abbildung 1.33, aus einer Kugel, welche von einer Feder in ihrem Ventilsitz gehalten wird. Bild 1.33.: Ventil in Rohrleitung Bild 1.34.: Ventil: Druck-Fluß Spannung-Strom – Wirkt der Druck von der rechten Seite her, kann kein Wasser fließen. weil die Kugel das Rohr verschließt, Abb. 1.33 oben. Eine harte Kugel würde mit steigendem Druck sogar um so fester in den Ventilsitz gepresst. Wirkt dagegen der Druck von der linken Seite her, kann Wasser fließen, sobald der Druck der Feder überwunden ist, siehe, Abb. 1.33 unten. Je höher der Druck, um so größer der Fluss. Der Zusammenhang zwischen Fluss und Druck ist in Abbildung 1.34 dargestellt. Deutlich kann man erkennen, dass das Ventil nur in die eine Richtung durchlässig ist, für die andere Richtung des Drucks sperrt es. Man sieht auch, dass für die Überwindung des Drucks, welcher durch die Ventilfeder verursacht wird, ein Mindestdruck erforderlich ist, damit Wasser fließen beginnen kann – nennen wir diesen den Durchlassdruck. Nach diesem kurzen Beispiel kehren wir wieder zu dem Übergang aus einem p- und einem n-Halbleiter zurück. Das elekronische Bauteil, welches aus einem p-n-Übergang besteht, wird Diode genannt. ver.2.05 pre 24. März 2009 (Kap.1-4, 8)) 29 1. Grundlagen der Elektronik Bild 1.35.: Symbol Diode [Wika] Bild 1.36.: Symbol [Wika] Leuchtdiode Betrachten wir wieder den Übergang zwischen einem p- und einem n-leitenden Halbleiter wie in Abbildung 1.29. Bild 1.37.: Kennlinie [Roh83] Diode Legt man an die p-leitende Seite, rechte Seite in der Abbildung, eine positive und an die linke, n-leitende Seite eine negative Spannung, dann „fallen“ von der n-dotierten Seite Elektronen aus dem Leitungsband in die Löcher des Valenzbandes – sie rekombinieren. Durch die angelegte Spannung werden von der rechten, n-leitenden Seite ständig Elektronen, von der linken, p-leitenden Seite Löcher nachgeliefert. Es fließt ein Strom. Diese Richtung nennt man die Durchlassrichtung der Diode. Liegt die Spannung in umgekehrter Richtung an, wie in Abbildung 1.30, so werden die Elektronen im Leitungsband des n-dotierten Halbleiters, und die Löcher im Valenzband des p-dotierten Halbleiters in entgegengesetzte Richtung gezogen. Der p-n-Übergang verarmt an freien Ladungsträgern und es entsteht eine Sperrschicht. Diese wird um so breiter, je höher die Spannung ist. Es kann, jedenfalls bis zu einer gewissen Grenze, kein Strom fließen. Man nennt dies daher die Sperrrichtung der Diode. Dennoch fließt auch in Sperrichtung ein sehr kleiner Strom, der von den Minoritätsladungsträgern verursacht wird. Es sind dies die Löcher im n-Leiter und Elektronen im p-Leiter. Wie wir auch bereits gelernt haben, ist diese Leitfähigkeit stark temperaturabhängig. Abbildung 1.35 zeigt das Schaltsymbol der Diode. Der Pfeil symbolisiert die Durchlassrichtung. Strom kann in Pfeilrichtung fließen, d.h. von ⊕ nach . Der Strich im Schaltsymbol zeigt die Sperrichtung an 10 . Legt man positive Spannung auf der rechten Seite (Strich) und negative an der linken (Pfeil), so sperrt die Diode, es kann kein Strom fließen, siehe Abbildung 1.37. In Sperrichtung kann eine Diode die Spannung nur bis zu einer bestimmten, vom Bauteil abhängigen, Größe halten. Darüber hinaus wird die Sperrschicht mit Ladungsträgern überschwemmt. Dieser Effekt verstärkt sich – es entsteht eine Lawine. Man sagt auch, die Diode „bricht durch“, der Strom steigt stark an. 10 Für die Anschlüsse der Diode existieren die Bezeichnungen Anode, linke Seite in Abb. 1.35, und Kathode für die rechte. Bei ⊕ an der Anode und an der Kathode ist die Diode durchlässig 30 Student’s Copy FbI SS09